![\begin{displaymath}
\frac{u_{i,j}^{n+1}-u_{i,j}^{n}}{\Delta t} = \alpha \left[ \...
...{u_{i,j+1}^{n}-2u_{i,j}^{n}+u_{i,j-1}^{n}}{\Delta y^2} \right]
\end{displaymath}](img335.png)
Pour résoudre l'évolution du système, on pose le schéma sous la forme :
avec :
![\begin{displaymath}
\left\{
\begin{array}{l}
A = 1- 2 \alpha \frac{\Delta t}{\De...
...}{\Delta y^2}\\
i \in [1,I]\\
j \in [1,J]
\end{array}\right.
\end{displaymath}](img337.png)
On considère
![]() et
et
![]() . Les conditions limites sont alors les
. Les conditions limites sont alors les
![]() que l'on considère
comme des constantes (conditions limites de Dirichlet).
que l'on considère
comme des constantes (conditions limites de Dirichlet).
On constate que ![]() et
et ![]() . Nous les différencions pour une meilleure compréhension de la méthode.
On pose :
. Nous les différencions pour une meilleure compréhension de la méthode.
On pose :
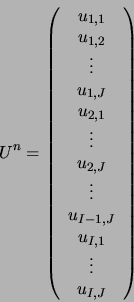
La forme matricielle du problème est alors :
M est une matrice ![]() . Elle a la forme d'une matrice par blocs :
. Elle a la forme d'une matrice par blocs :
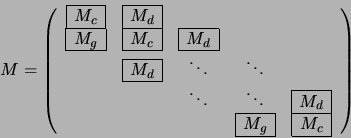
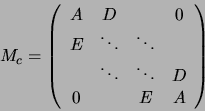
Chaque bloc est de taille ![]() et :
et :

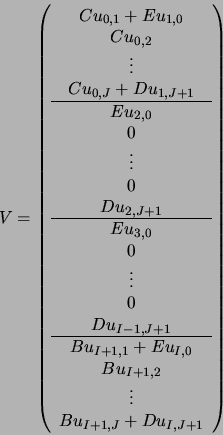
Comme dans le cas ![]() , le vecteur
, le vecteur ![]() de taille
de taille ![]() contient les conditions aux limites :
contient les conditions aux limites :
Remarque : Pour résoudre ce genre de problèmes sous Matlab, il est intéressant de déclarer ![]() comme une matrice creuse (sparse matrix).
Dans un langage tel que le C ou Fortran on codera la matrice de façon intelligente. On ne rentrera que les bandes non nulles de la
matrice et adaptera la multiplication multiplication matricielle au type de codage choisi.
comme une matrice creuse (sparse matrix).
Dans un langage tel que le C ou Fortran on codera la matrice de façon intelligente. On ne rentrera que les bandes non nulles de la
matrice et adaptera la multiplication multiplication matricielle au type de codage choisi.
La condition de stabilité de ce schéma est :
En prenant
![]() , la condition de stabilité est :
, la condition de stabilité est :
Cette condition est encore plus restrictive que dans le cas ![]() !
!
avec les notations :
Ce schéma est inconditionnellement stable même en ![]() . On a cependant perdu la structure tridiagonale
du système
. On a cependant perdu la structure tridiagonale
du système ![]() . Le système est de type :
. Le système est de type :
avec :
Pour résoudre le système, il est alors nécessaire d'inverser (schéma implicite oblige)
une matrice de taille ![]() . Il faut alors absolument utiliser un algorithme d'inversion
adapté (ici Gauss-Seidel par exemple).
. Il faut alors absolument utiliser un algorithme d'inversion
adapté (ici Gauss-Seidel par exemple).